HATIS (Human Autonomy Teaming Interface System) is composed of tools, multimodal interfaces, and human-autonomy teaming software, which will permit human operators and unmanned and urban aerial/automobile automation to collaborate in real-time risk management and mitigation (RMM), data collection and display.
Risk assessment and management will be needed if autonomous unmanned vehicle systems (UVS) are to be inserted into the national transportation system, especially if there are large numbers of these as proposed by various entities such as Amazon and Uber. The HATIS innovation in human autonomy teaming is being designed and tested to work with real-time risk assessment algorithms developed by NASA for evaluation and management of risks (e.g., people, vehicle, property) in UVS operations. Tests are being conducted in an R3 (Real people, Real system, and Real-life consequences) environment.
HATIS supports the risk assessment and real-time risk management tasks (e.g. monitoring, alerting, assessment, and mitigation) by providing the following technology capabilities:
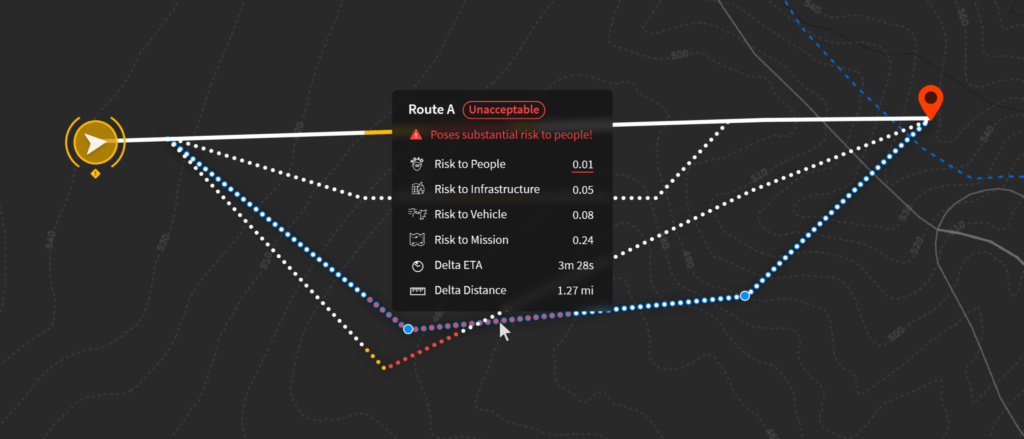
- Helps the operator with pre-mission risk assessment and during-mission planning and re-planning
- Creates interactive visualizations that assist operators to more easily understand and manage data
- Enables collaboration between the human and the automation to determine risk management roles and responsibilities based on the nature and severity of risks, quality of automation determined solutions, and operator status (workload, fatigue, etc.)